研究内容についてはyoutubeチャンネルもご覧ください.
3つの主要テーマ
柔軟物のモデル化・認識・操作,行動学習
柔軟物に関わる作業は,生活環境・工場環境・物流現場など様々な環境で見受けられますが,それを自動機械におこなわせることは容易ではありません.当研究室では,柔軟物のモデリング,認識・操作,行動学習などについて研究し,体系化することを目指しています.伝統的な画像処理手法や動作計画手法の拡張,深層学習,強化学習,模倣学習など,様々な手段を用いて取り組んでいます.以下のような研究成果があります.
- 予測に基づく布の操作手順生成
- 折り畳み作業の自動獲得
- 柔軟物用シミュレーションの開発
- 微分可能シミュレーション
モバイルマニピュレータの行動学習,行動計画
移動台車にロボットアームを搭載したタイプのロボット(モバイルマニピュレータ)を対象とした知能化の研究です.モバイルマニピュレータは,移動能力と物体操作能力を併せ持つため,様々な活用方法があります.一方で,動き自由度の冗長性や周囲環境の複雑さに対応する必要があります.当研究室では,視覚と動作計画や行動学習の観点からいくつかの研究を進めています.以下のような研究成果があります.
- 家事支援ロボットのシステムインテグレーション
- 長期活動経験に基づく物体認識行動の効率化
- タスク計画と動作計画の同時実行
自律型ロボットによる人の作業支援
人に寄り添い,人の作業を支援するためのロボットシステムの研究です.ここでロボットに求められることは,自身のペースで作業を進めることではなく,人の動作や意図を認識したり予測したりしながら,その人に合わせて適切に動くことです.当研究室では,日常活動の例として着衣や物取りの支援に取り組んでいます.以下のような研究成果があります.
- 片麻痺の方を想定した着衣支援システム
- 分枝型ロボットの提案と作業支援の実現
- 人の行動を真似することによる物体操作能力の獲得
その他のテーマ
他にも,以下のような研究課題に取り組んでいます.
基盤モデルを用いたロボットの自律行動制御
ロボットには,環境や状況に応じて自律的に判断し行動する能力が必要です.基盤モデルは,ロボットの意思決定を支える基本的な知識の集合体です.これを用いることで,ロボットの行動生成に高い柔軟性がもたらされ,複雑なタスクを効率的に遂行できるようになります.
- 手順のある作業の行動生成における力学的現象の考慮
- 遮蔽がある状況下での適切な押し避け行動の生成
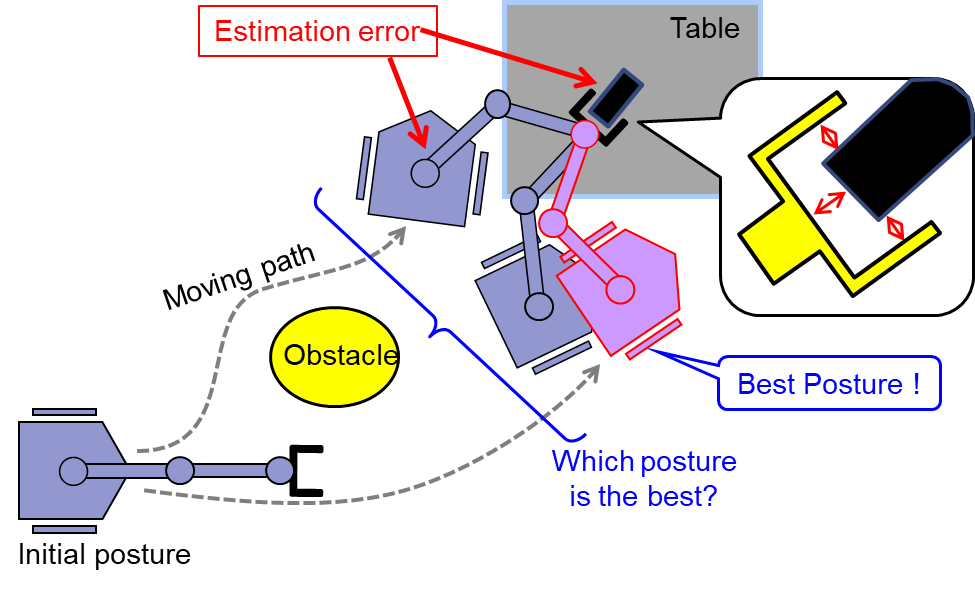
多自由度ロボットの作業計画・動作計画
多数の動き自由度を持つロボットは,様々な姿勢で作業をすることができます.その一方,どんな姿勢を取ればよいのかをよく考える必要が出てきます.そこで,姿勢を適切に決めるための評価基準や姿勢選択の方法,多自由度であることを活用した動作生成法を提案してきました.
- 自動生成した物体モデルを入力とする把持計画
- 移動の誤差を考慮した物体の把持姿勢計画
- 仮想アームを用いた障害物回避手法
フィールドロボット視覚
人手不足が懸念されている屋外作業の自動化に寄与するための研究テーマです.当研究室では,捜索作業や点検作業,農作物の収穫作業を補助する認識機能の研究を進めてきています.
- 捜索・状況確認活動を支援する画像認識システム
- 結球型野菜自動収穫機のための収穫物検出
- 自律走行ロボットのための環境マップ構築・自己位置推定・走行可能経路の検出
製造工程での物体操作に適したハードウェア製作
製品製造を自動化する文脈において,一般的な考え方に捉われない新たなロボットハンドやセンサについて検討しています.
- 布地巻取りのためのエンドエフェクタ
- ケーブル配線のためのエンドエフェクタ
- 布生地展開作業を容易にする一対のエンドエフェクタ
人の作業計測におけるロボティクスの活用
人の作業能力を分析してロボットに活かす,または人の作業能力をロボティクスの技術を使って明らかにする研究をおこなっています.
- 縫製作業中の指の動きおよび力情報の計測
- 壁面塗装作業の計測システム構築と熟練者の作業能力解析
- 広範囲を異動する人の歩行運動推定
製造自動化のための認識と操作
工場での製品製造における単純作業を自動化するため,ロボットマニピュレーションを主題として企業との共同研究をおこなっています.
- コネクタ付きケーブルの姿勢推定と操作生成
- 立体縫製時の自動送り機構の開発と制御
- World Robot Summit ものづくりカテゴリへの出場